
Common problem
Minimally invasive medical devices, such as transcatheter valve and other structural heart delivery systems, GI endoscopy diagnostic and therapeutic instruments, are characterized as long, slender devices that need to cross tortuous segments, while also be able to transmit torque from the proximal end to the distal end. For example, a structural heart implant needs to be released via its delivery system through a screw-like motion. A snare for use in GI flexible endoscopy needs to be rotationally angulated to get the right approach angle for taking a biopsy. The bending flexibility required to reach their destinations inside in the body in the first place however can negatively impact the devices’ mechanical ability to transmit torque—its torsional rigidity decreases with the decrease in bending stiffness. A braided tube may possess the right flexibility, but may fail by kinking or twisting over itself when torque is applied. A stainless steel tube (hypotube) would likely have very good torque transmission properties, but may be too stiff to reach the destination.
Our solution
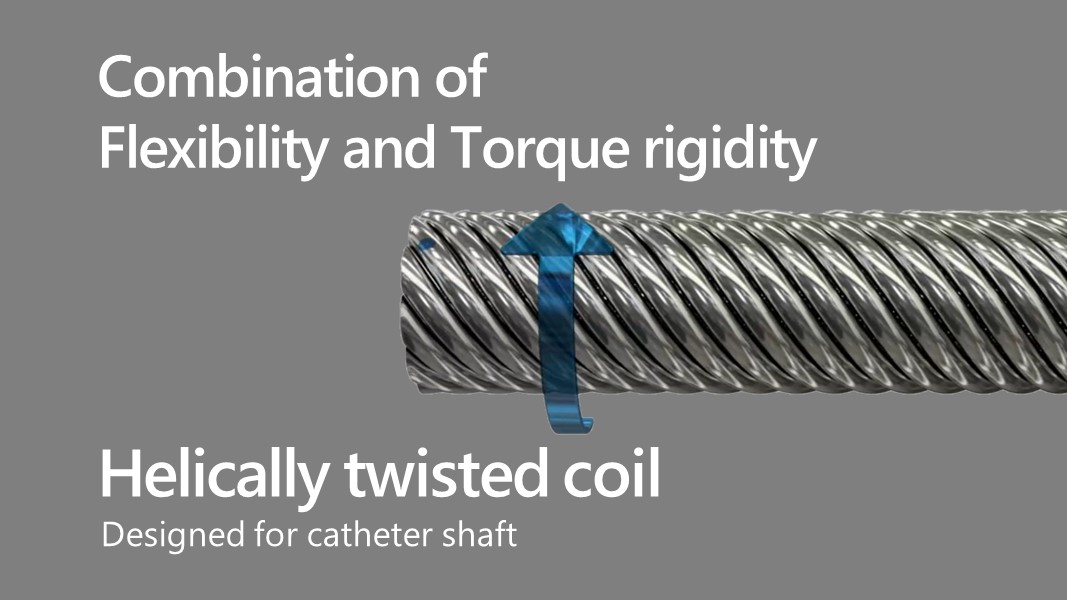
For applications where both torque transmission and bending flexibility is required, a ‘cable tube’ can be a good solution.
A ‘cable tube’ is a structure very similar to a rope or strand as it is also formed by helically twisted wires over a core wire, but with the core wire removed to create a lumen inside said structure. When torque is applied in the twist direction of the cable tube, the wires will move towards each other. With a sufficiently stiff base material (e.g. stainless steel), the wires compression of each other becomes minimal, translating deformation into rotation of the shaft itself, and a high transmission of torque is achieved.
